主要研究地外关键基础零部件设计与智能制造、地外装备自主装配、空间碎片处置装备。
服务国家军民融合战略,青岛理工大学深度参与国家载人航天工程、探月工程、中国天眼FAST信息化工程建设、陆军装备云建设等,建立了“高端装备”山东省首个“数字孪生”工程实验室(山东省高端装备数字孪生与可视化遥操作工程实验室),与国家航天局空间碎片监测与应用中心、昆宇蓝程(北京)科技有限责任公司、青岛古镇口核心区联合建设了“空间碎片监测与低轨卫星组网联合实验室”。
(a) 高端装备监测
如图1所示,通过数字孪生关键技术研究,建立数字孪生工程方法,创建数字孪生基础平台,建立装备及关键部件的数字孪生模型,对装备及关键部件运行进行质量监测及安全寿命评估,实现对高端装备(如高速列车、直升机等)的全域感知、运行状态监测和故障预测,形成相关的工业标准或规范;在此基础上,研究高端装备运行状态的可视化仿真技术,实现孪生数据驱动的装备实时仿真。

图1高端装备监测与数字孪生
(b)装备数字润滑运维
主要研究高端机械装备润滑建模与高性能数值模拟算法及软件包开发、润滑状态可视化测量与调控、装备关键零部件在线润滑状态测量与运维等方面的理论、实验与工程应用。开发了耦合多因素的零部件多尺度高性能润滑数值模拟算法,实现了对装备关键零部件的润滑状态预测;基于光干涉可视化技术开发了不同型号的油膜润滑测量平台,基于数字孪生技术,实现了润滑油膜远程测试的遥操作;搭建了装备关键零部件综合测试平台,通过多维度润滑数据提取与分析,实现了零部件润滑状态的数字孪生,据此进行性能评估、寿命预测与运维方案设计。其研究总体路线图2所示。
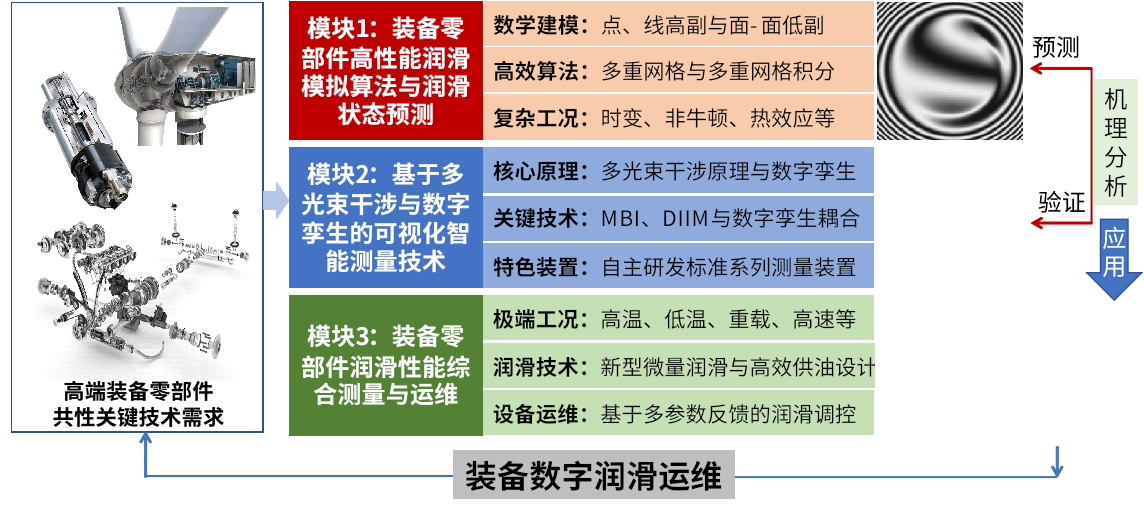
图2装备数字润滑运维研究路线图
(c)装备远程监测与AR协作
装备远程监测与AR协作主要研究增强现实技术(Augmented Reality, AR)、监测技术、人工智能技术、数字化装配技术等方面的理论和应用。针对地外机械臂遥操作的需要,提出了一种基于RGB-D图像及姿态示教器的远程机器人AR遥操作示教人机方法。该系统将远程端机器人的示教环境RGB图像和深度图像发送到本地端,示教人员在本地端完成远程机器人示教。大大改善了遥示教的人机交互性。如图3所示。
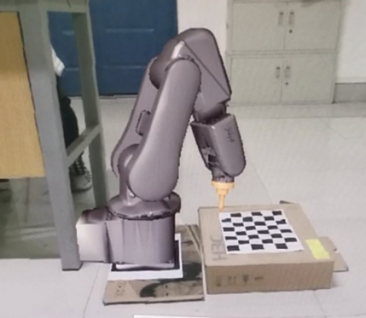
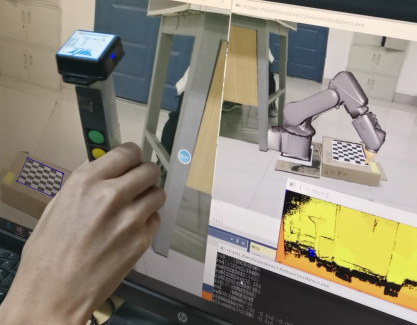

(a)增强现实注册 (b)姿态示教 (c)物理机器人运动
图3 基于增强现实技术的机器人遥操作示教